DDS 介紹
DDS (Data Distribution Service) 是一種 pub-sub 的通訊規格,希望可以達到可靠、高效能、安全、即時、可擴展、並且以資料為導向的傳輸。為了達成這個目的,DDS 有如下特色功能:
- 以資料為導向:過去的傳輸重視的是「誰連到誰」,所以我們會需要明確知道通訊者的 IP 位址並且開 socket 進行連接。DDS 重視的是「傳什麼資料」,任何人發佈的資料都會指定 topic,有興趣的人可以自行訂閱,而不需要管這資料是誰傳來的。
- 去中心化架構:DDS 並非以往 server-client 的架構,每個通訊節點都是對等的。因此任何人都可以隨意加入或離開通訊網路,而不會有任何通訊上的問題。
- 豐富的 QoS:為了達到可靠、高效能,DDS 有非常多的 QoS(Quality of Service),使用者可以依照自己想要的通訊品質來進行調整,例如reliability, durability, transport priority等等。
DDS 的規格制定是由 OMG (Object Management Group) 這個組織所負責,OMG 其實也有制定不少跟程式設計師有關的規格,舉例來說 Object Oriented (物件導向)常用到的 UML,就是由 OMG 所制定。
在 DDS foundation 裡面有許多關於 DDS 的文件,其中比較值得注意的是下面這五份:
- DDS v1.4: 定義 DCPS (Data-Centric Publish-Subscribe),主要是定義各種通訊角色的行為以及 API 的制定
- DDSI-RTPS v2.3: 定義 DDSI,定義 DDS 的行為
- DDS-XTypes v1.2: 用在 topic 的 data type 規範
- DDS-Security v1.1: 定義 security 的規範
- Interface Definition Language (IDL) v4.2: IDL 的定義規範
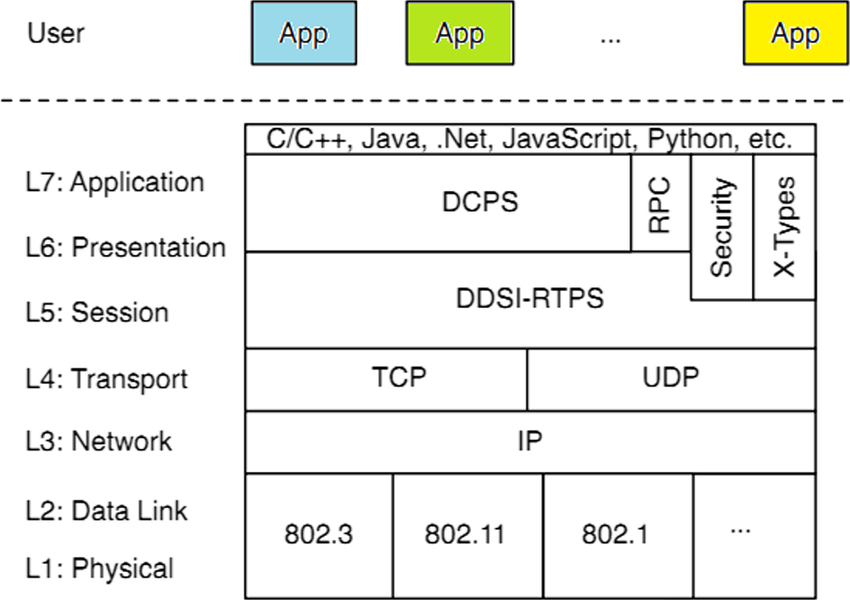
從網路 OSI 7 layer 的角度來看,DDS 是在 transport layer 之上,橫跨 session, presentation, application layer。 雖然規格上 DDS 支援在 TCP / UDP 上運作,不過實際上大多數都是跑在 UDP 比較多。 DDSI 定義了實際的封包應該要長什麼樣子,DCPS 則是定義了 pub/sub 等各種角色是如何進行互通。 可參考下圖來看 spec 是怎麼對應到不同的 layer (圖源)。
DDS 最初是用在軍事、航太上,已經有悠久的歷史了,後來 ROS 2 在尋找可利用的通訊層時也看上 DDS 的可靠穩定,所以 DDS 也開始被應用在機器人領域。
DDS 目前有很多種選擇:
- CycloneDDS:ADLINK (後來 spin-off 出去叫做 ZettaScale) 提出的開源版輕量化 DDS。ROS 2 的 Galactic 版本是以 CycloneDDS 為預設通訊層。
- OpenSplice DDS:原本是 Prismtech 的主力產品(後來被 ADLINK 買下後又 spin-off 出去成為 ZettaScale),有分開源版和商業版。
- FastDDS:Eprosima 的 DDS 開源解決方案,跟 CycloneDDS 一樣被應用在 ROS 2 上。
- Connext DDS:RTI 這家公司所提出的 DDS,並沒有開源。
- OpenDDS:開源社群中知名的 DDS 實作
| DDS | Vendor | Impl. Lang | ROS 2 RMW | Supported API | Shared Memory | License |
|---|---|---|---|---|---|---|
| Fast DDS | eProsima | C++ | rmw_fastrtps_cpp | C++, Python | V | open source |
| Cyclone DDS | ZettaScale | C | rmw_cyclonedds_cpp | C, C++, Python, Rust | V (iceoryx) | open source |
| RTI Connext DDS | RTI | C/C++ | rmw_connextdds | C, C++, Java, Python, C#, Ada, etc. | V | commercial |
| GurumDDS | GurumNetworks | C/C++ | rmw_gurumdds_cpp | C/C++ mainly | V | commercial |
| OpenDDS | OCI | C++ | Not support | C++, Java | V | open source |
| OpenSplice | ZettaScale | C/C++ | Not support now | C, C++, Java, etc. | V | commercial |
目前個人推薦的是使用 CycloneDDS,輕量且效能高,主要程式是用 C 撰寫而成。