ROS 2 導航
在 ROS 2 中,如果想要打造自主移動式機器人 (Autonomous Mobile Robot, AMR),基本上離不開 ROS 2 的 navigation2 套件。 navigation2 是由 Open Navigation 所維護,程式碼都在 GitHub 上開源。 以下的教學都來自於他們所提供的官方文件。
安裝
- 首先先確保自己已經安裝 ROS 2 並且 source 環境,這邊以 jazzy 為例
- 如果我們不需要用最新版的功能,可以直接使用 ROS apt repo 的版本
- navigation2: 實際的導航程式
- nav2-bringup: 用來啟動導航、地圖、Rviz、模擬環境或是硬體 driver 的啟動程式,一般來說會是 launch file
- nav2-minimal-tb*: turtlebot 的模擬硬體和環境
sudo apt install \
ros-$ROS_DISTRO-navigation2 \
ros-$ROS_DISTRO-nav2-bringup \
ros-$ROS_DISTRO-nav2-minimal-tb*
使用
- 運行也非常容易,直接執行下面指令即可
- 會看到模擬環境 Gazebo 和用來顯示的 Rviz 被啟動
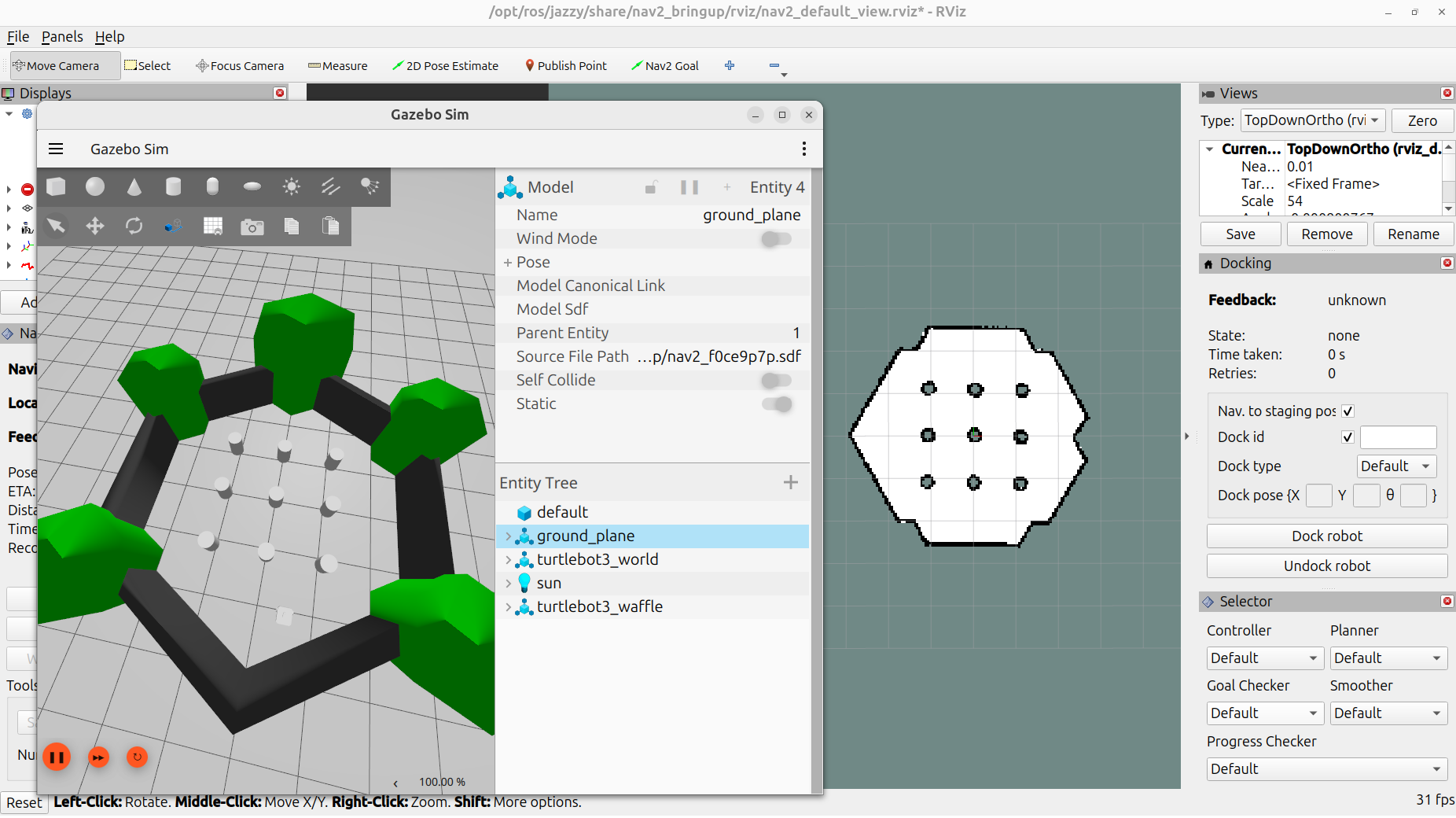
- 操作流程
- 首先先點 Rviz 上面的 2D Pose Estimation,注意位置要對應到 Gazebo 機器人的位置
- 會看見青色和紫色的 cost map 覆蓋了整個 Rviz 上的地圖,這代表 navigation 成功定位機器人位置了
- 點選 Rviz 上面的 Nav2 Goal,然後在地圖上紫色的區域拉箭頭,機器人就會自主導航到指定位置
- 可以看看 Gazebo 上的機器人是不是也有移動到相對應位置
- 你可以用另外一個套件
teleop_twist_keyboard來用鍵盤操控機器人i是前進、j和l分別是左右轉、,是後退、k則是暫停